BlueCactus (we call him Slitty), the second project of MD Enterprises concerning autonomous robots.
The old site is still here: BlueCactus Website

For a copy of the old site, read along past the break (in Dutch).
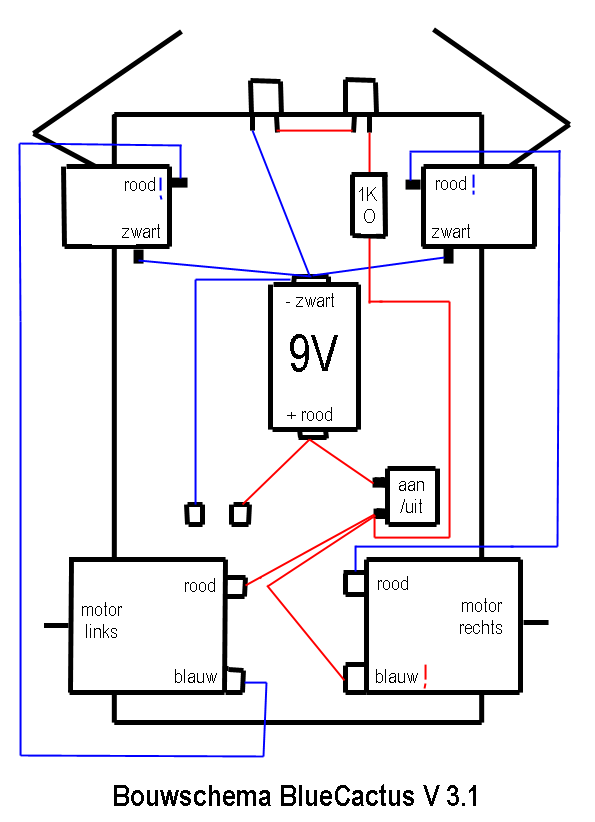

De huidige versie van BlueCactus is versie 3.1
VERSIE 3.1
Na een beslissing te hebben genomen over het onderstel, zijn we aanbeland bij de architectuur
van de aandrijving en dergelijke.
We willen behalve dat het rijdt, het ook keert als het op
object stuit. Hiervoor hebben we 2 microswitches ingebouwd. Omdat we werken volgens het principe
van een Braitenberg-vehicle is het voldoende om de "linker" switch met een bumper te integreren
in het circuit van de rechter motor, en vice versa
VERSIE 3.0
Zo kwamen we aan met een oude Funai telefoonhoorn. Klein, licht en met punten om op de lader
te leggen bleek dit uiterst geschikt voor ons project. Ook de vormgeving begon nu meer tot
de verbeelding te spreken; door de antenne leek onze cactus op een dier met een staart...
VERSIE 2.0
Om het gewicht sterk te reduceren gebruikten we nu als frame een plaatje plexiglas.
Door de methode van het monteren (vastlijmen), liet de stevigheid echter nogal wat
te wensen over. We besloten om toch over te stappen op een ander frame.
VERSIE 1.0
was gebaseerd op het frame en met de kap van een Philips HR 6325 stofzuiger,
maar te zwaar voor de motortjes die we gebruiken; namelijk 3-6V Mabuchi electro-motortjes.
We gebruiken 2 motortjes omdat we werken volgens het principe van de Braitenberg-vehicle.